



Robot Core Technology
① The combination of wheel shoe and suspension magnetic adsorption structure achieves low self weight, strong adsorption, and high load adsorption and crawling capabilities.
② The surface profiling design of the adsorption structure allows for movement on three-dimensional surfaces without the need for pre laid tracks.
③ The product has high flexibility in turning on three-dimensional surfaces and can also freely crawl on the facade.
④ Suitable for outdoor, high-altitude, and narrow space operations, it reduces the investment in various auxiliary equipment and safety protection facilities, greatly reducing safety risks while reducing manufacturing costs.
space operations, it reduces the investment in various auxiliary equipment and safety protection facilities, greatly reducing safety risks while reducing manufacturing costs.
② The surface profiling design of the adsorption structure allows for movement on three-dimensional surfaces without the need for pre laid tracks.
③ The product has high flexibility in turning on three-dimensional surfaces and can also freely crawl on the facade.
④ Suitable for outdoor, high-altitude, and narrow space operations, it reduces the investment in various auxiliary equipment and safety protection facilities, greatly reducing safety risks while reducing manufacturing costs.
space operations, it reduces the investment in various auxiliary equipment and safety protection facilities, greatly reducing safety risks while reducing manufacturing costs.
Mobile walking and its control technology
① The vehicle body control algorithm improves the stability, reliability and practicability of tracking.
② One key to realize the automatic correction of the crawling locomotive body attitude, there is no need to worry about the car body attitude caused by tracking deviation.
② One key to realize the automatic correction of the crawling locomotive body attitude, there is no need to worry about the car body attitude caused by tracking deviation.

Environment adaptive technology
① Integrated transfer device, integrated product components, good road surface passability to improve transport efficiency.
② Windproof device, vehicle windproof device and windproof shed, double windproof.
3 arc starting tool, inside installation, simple structure, light weight.
④ Adsorption walking gear, ferromagnetic material, good equipment absorption, light weight, easy disassembly.
⑤ Disassembly tooling, light alloy material, weight about 500g, convenient equipment on the ferromagnetic material to remove.
② Windproof device, vehicle windproof device and windproof shed, double windproof.
3 arc starting tool, inside installation, simple structure, light weight.
④ Adsorption walking gear, ferromagnetic material, good equipment absorption, light weight, easy disassembly.
⑤ Disassembly tooling, light alloy material, weight about 500g, convenient equipment on the ferromagnetic material to remove.

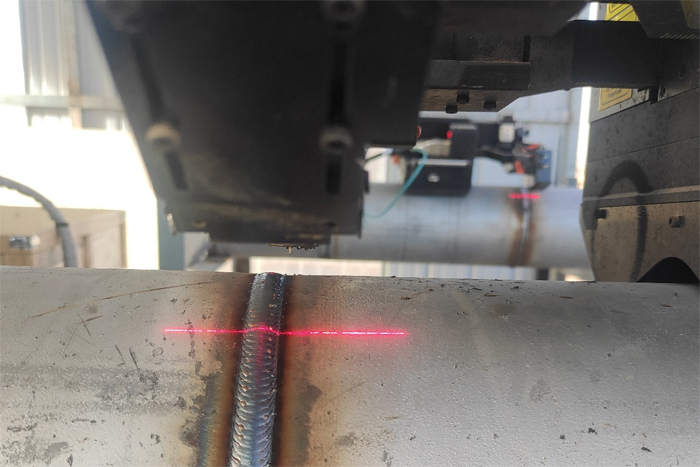
Multi Sensor Fusion Technology
①The robot utilizes welding seam tracking sensors such as posture and laser seam tracking, and integrates control to improve seam tracking accuracy and improve its ability to handle abnormal situations.
②By collecting and processing the robot's construction environment through multiple construction environment sensors, the robot can achieve adaptive control of the surrounding environment.
②By collecting and processing the robot's construction environment through multiple construction environment sensors, the robot can achieve adaptive control of the surrounding environment.